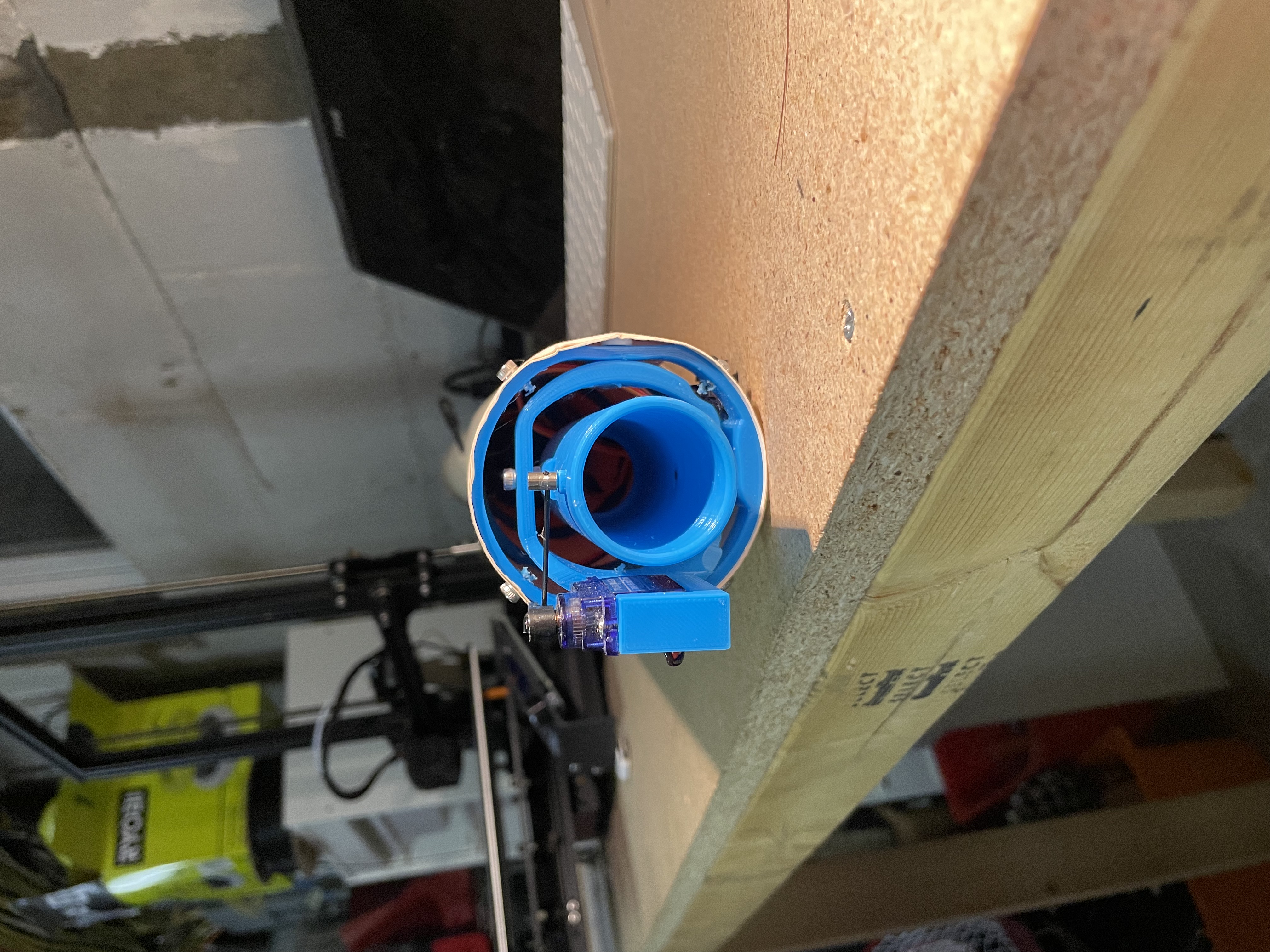
Thrust Vector Control (TVC) Mount
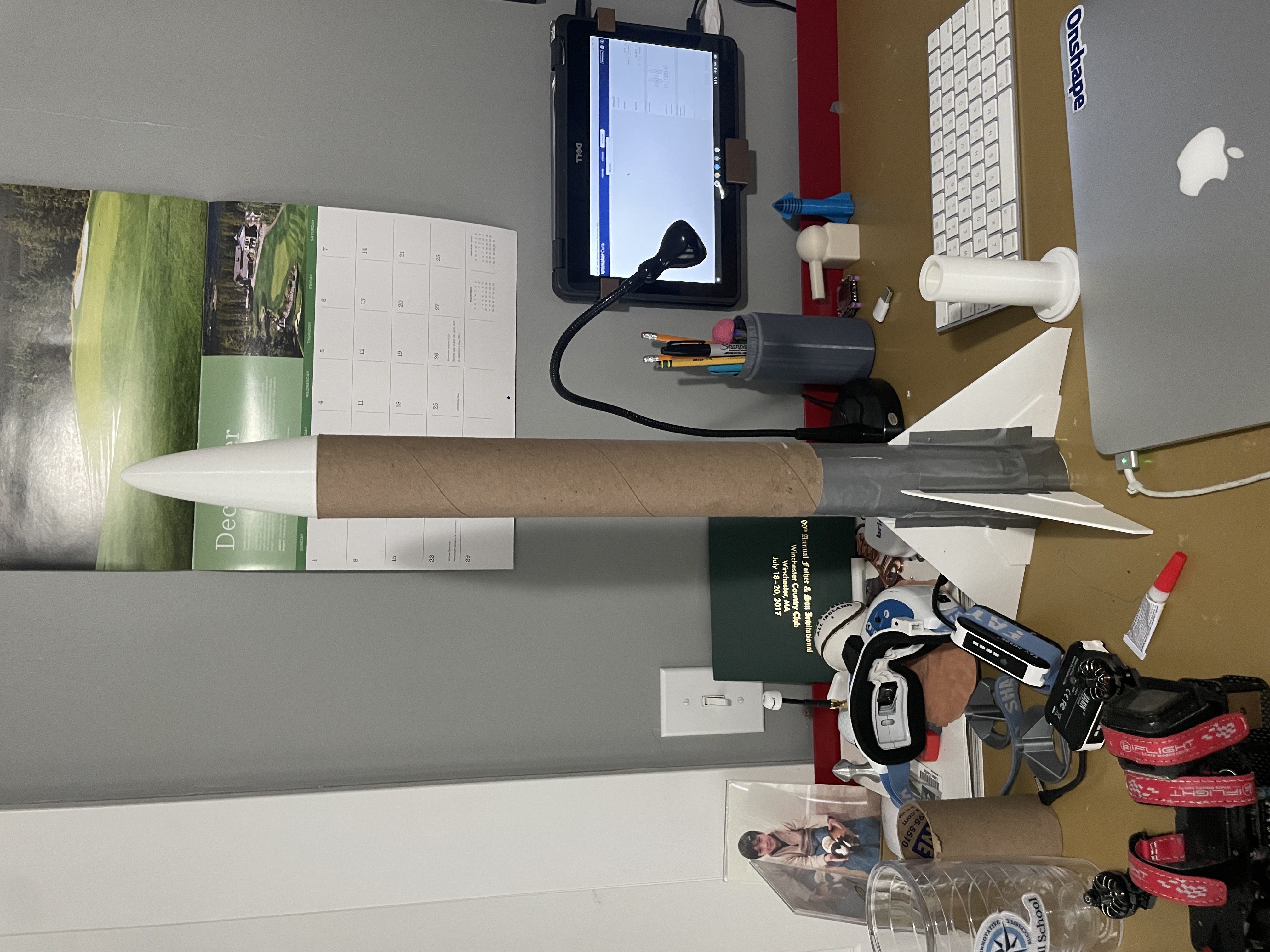
The Thrust Vector Control (TVC) Mount is the heart of the VMAX Rocket, enabling it to achieve stable and controlled flight without the need for traditional fins. Inspired by SpaceX’s gimbaling Raptor engine technology, this innovative system allows the rocket’s engine to pivot, keeping it on course during ascent.
What is a TVC Mount?
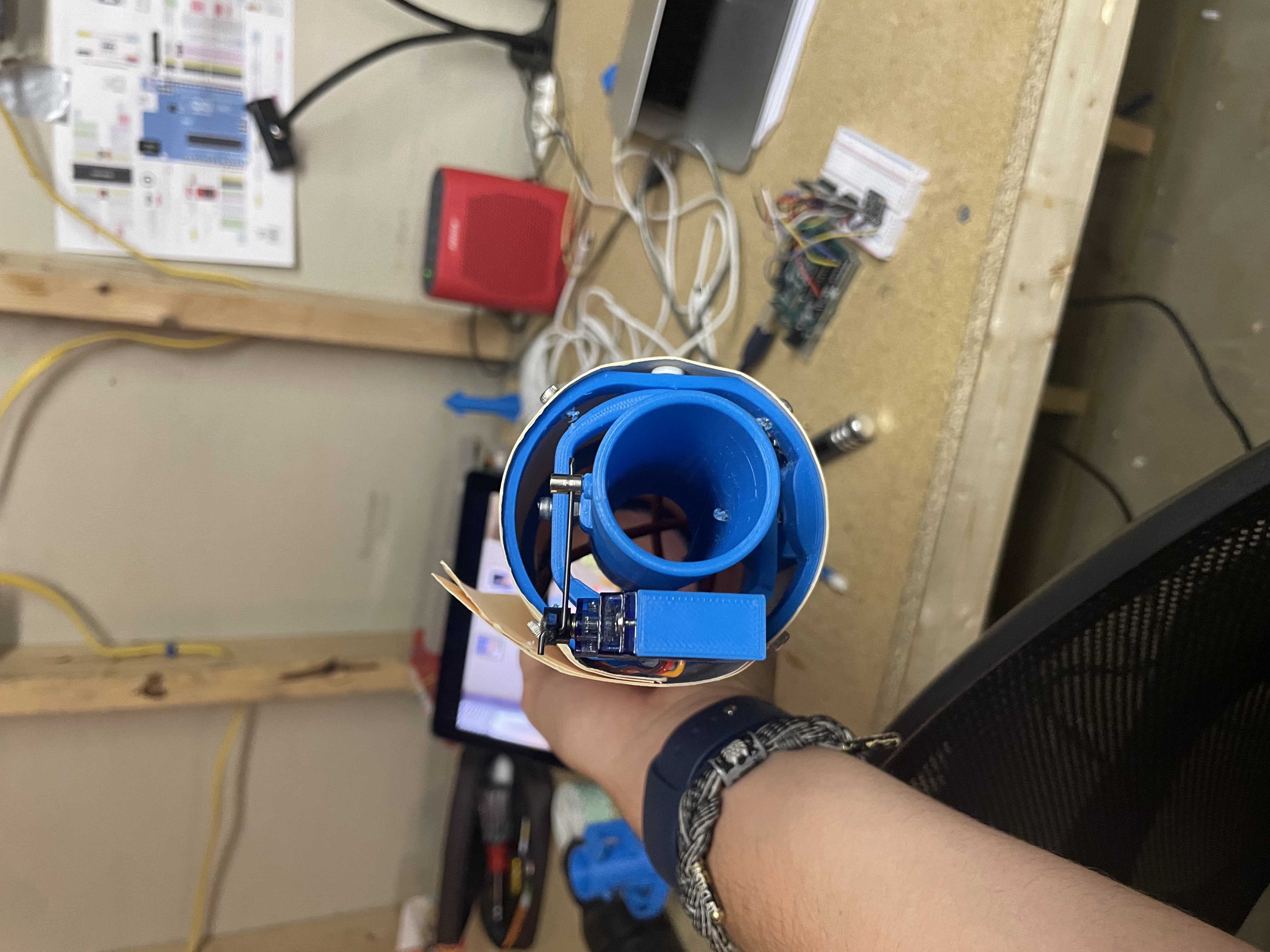
The TVC mount is a system that moves the rocket’s engine in two directions (X and Y axes), allowing the thrust to be directed dynamically. This control is essential for maintaining stability, especially in the absence of fins, by making real-time adjustments to counteract any disturbances during flight.
How It Works
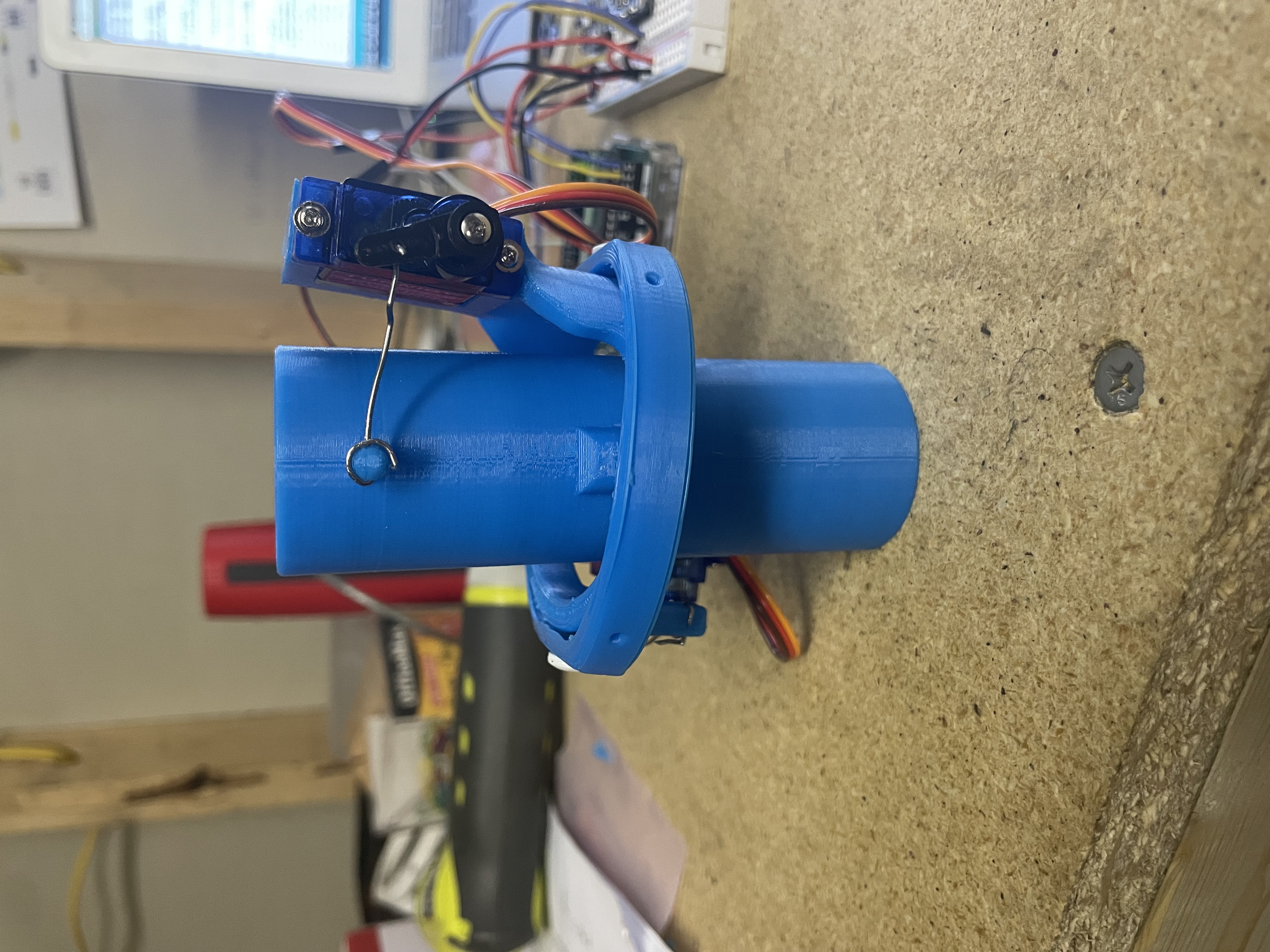
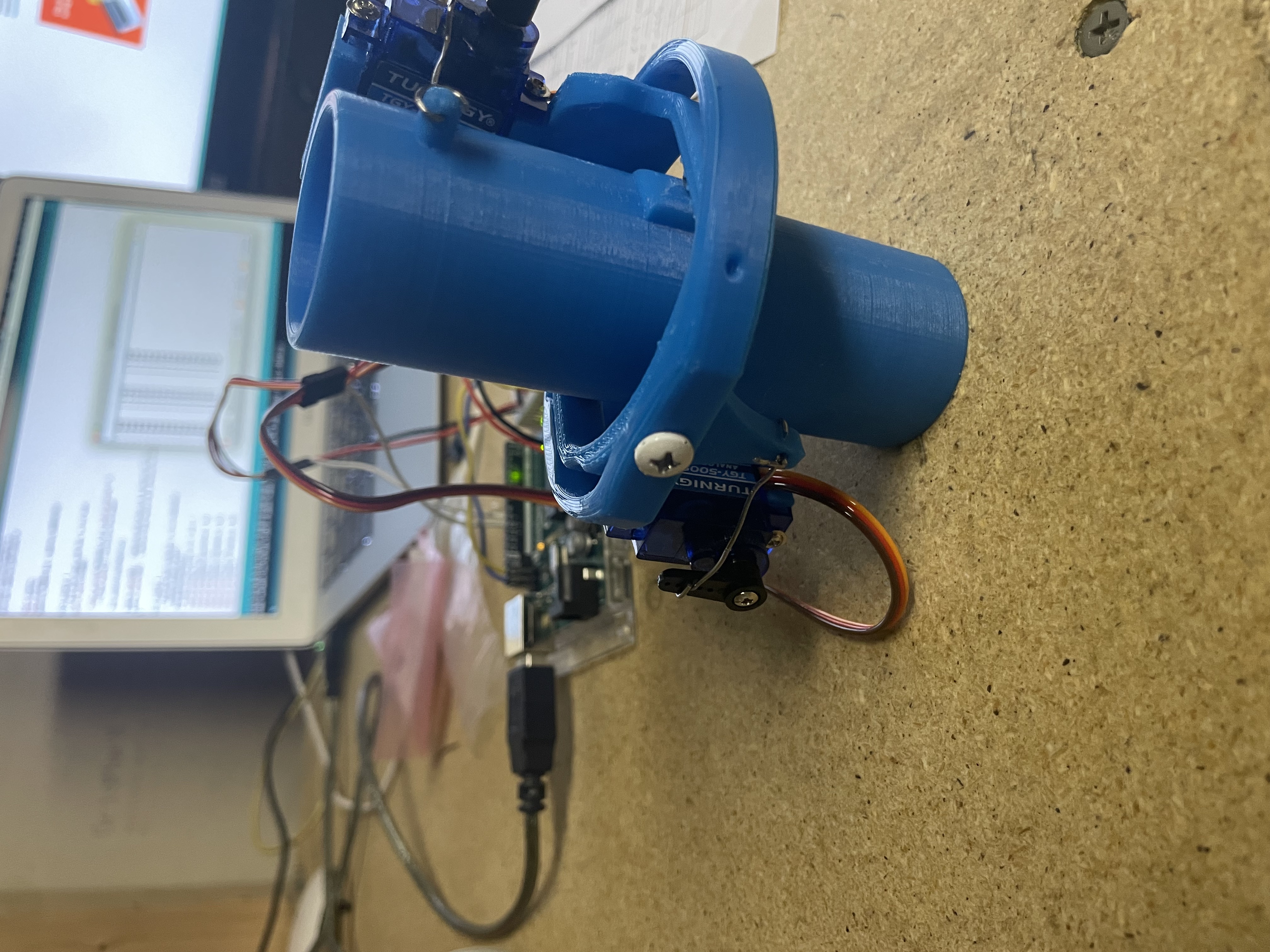
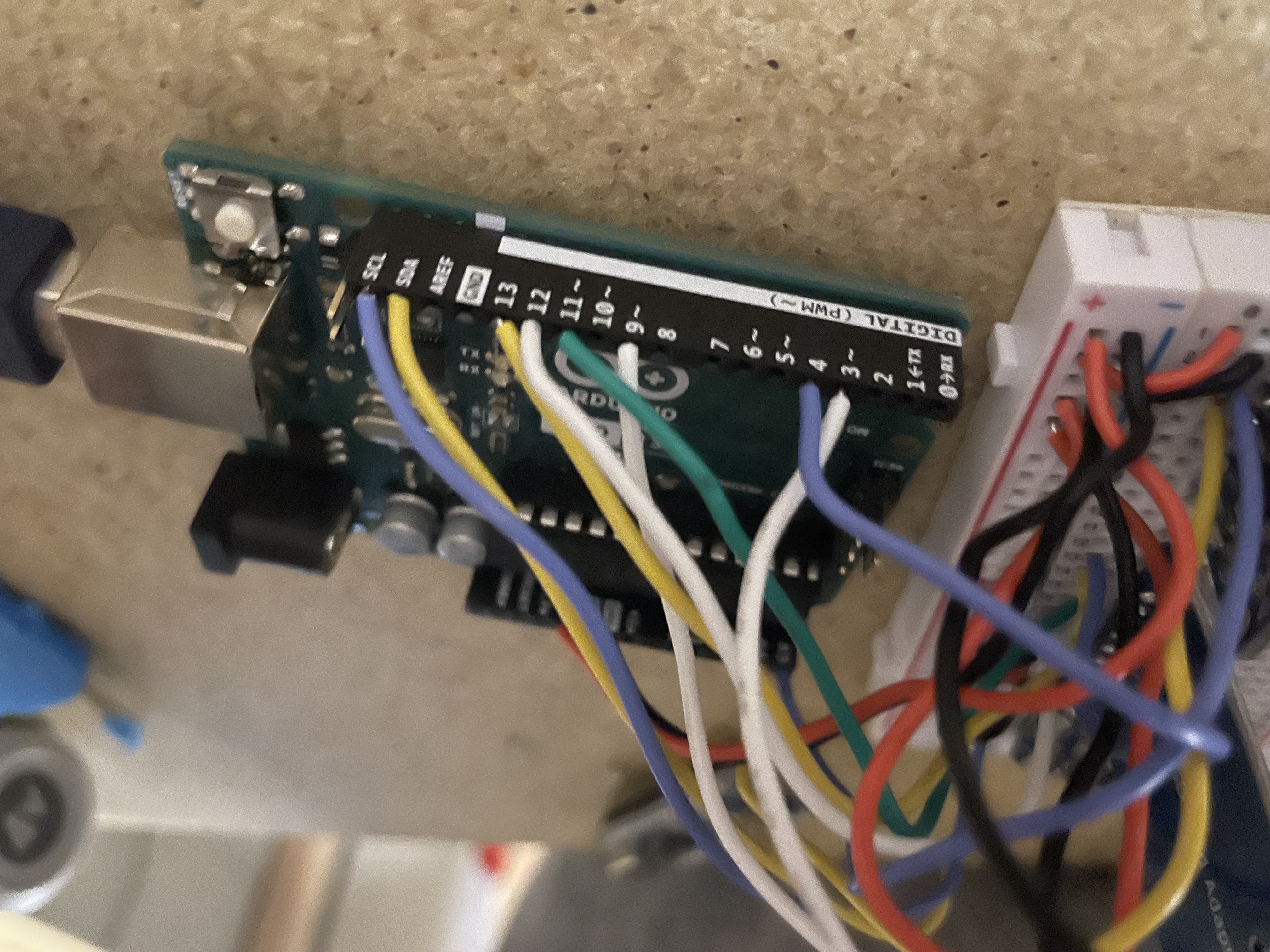
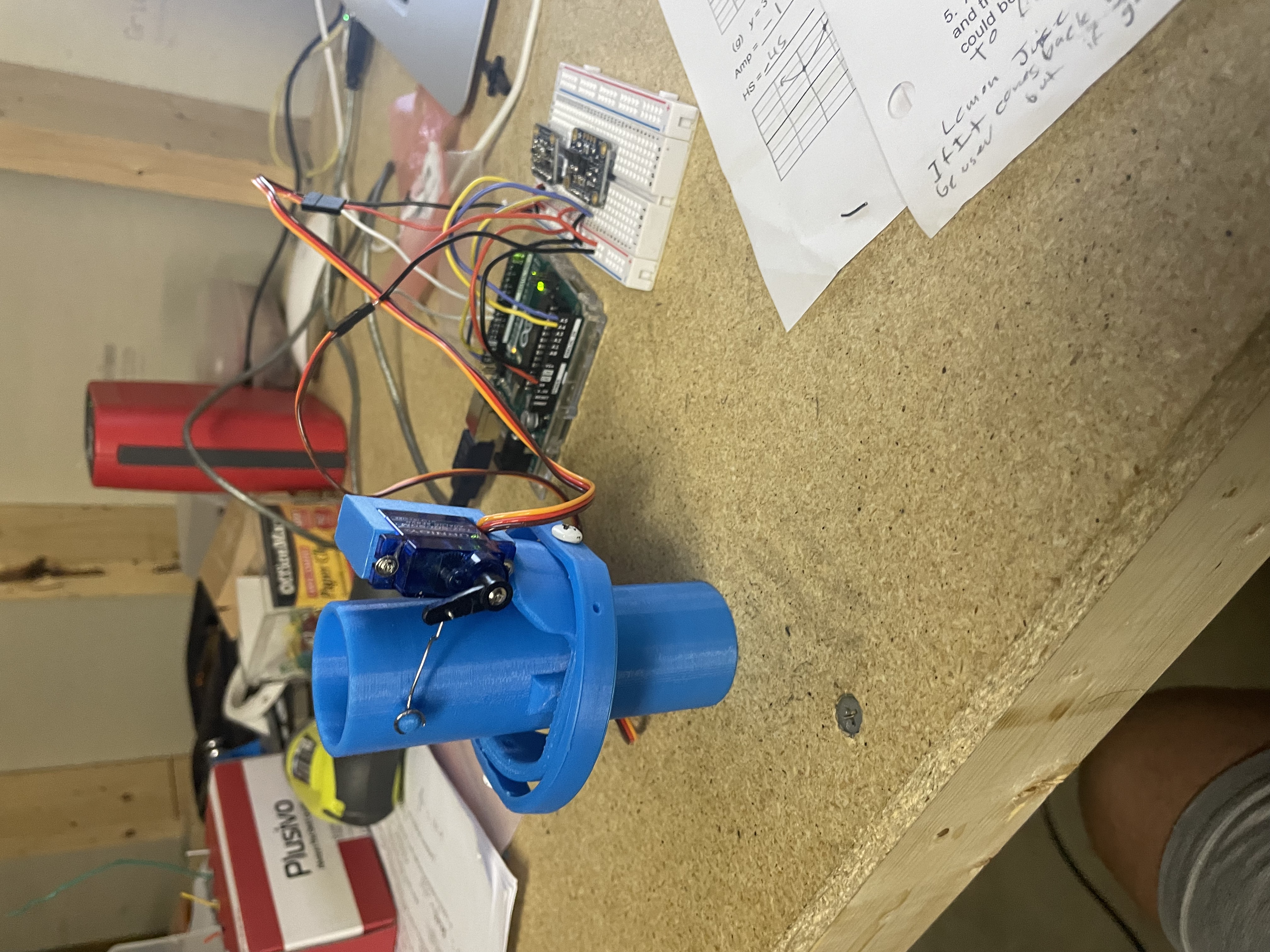
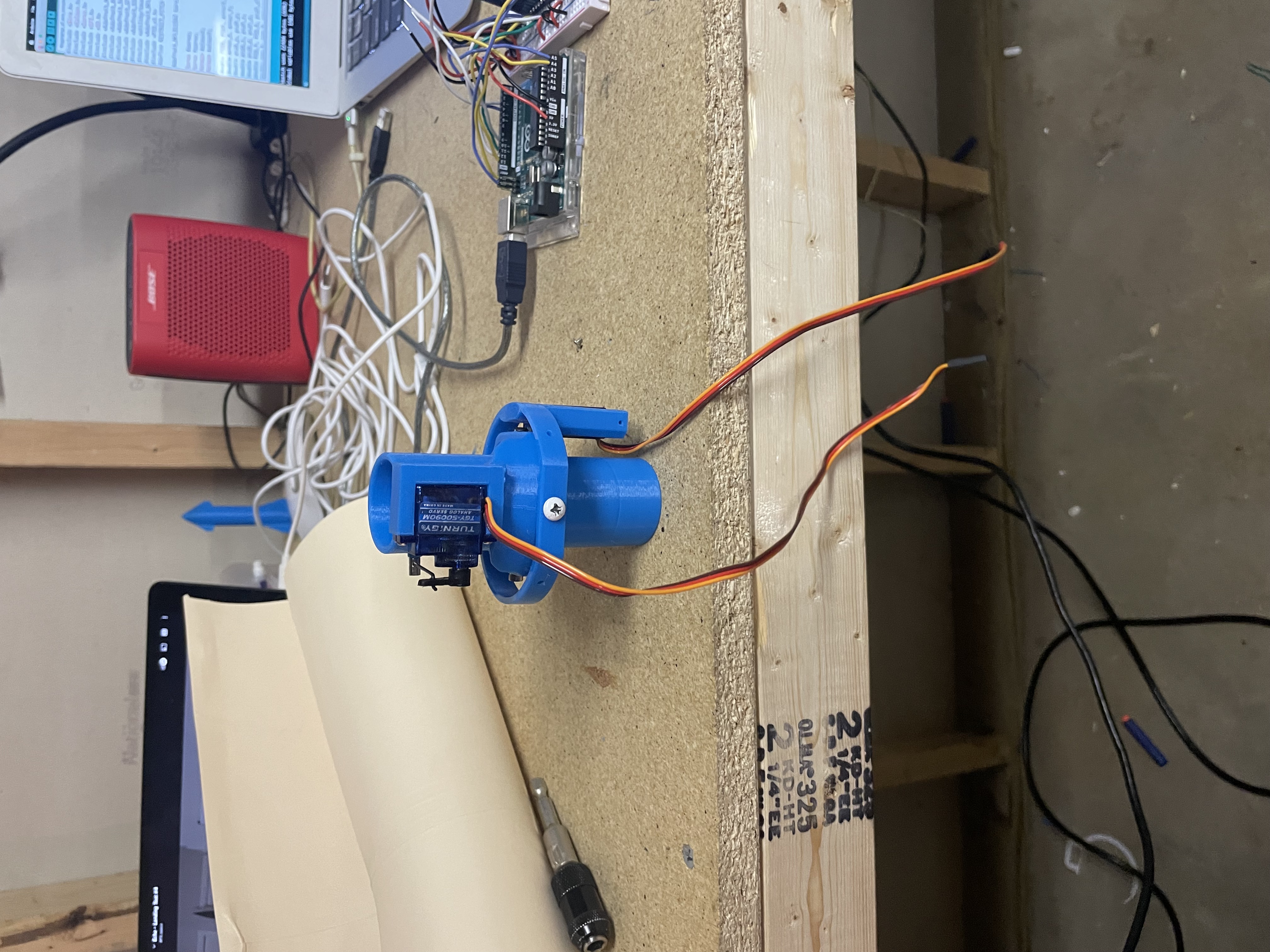
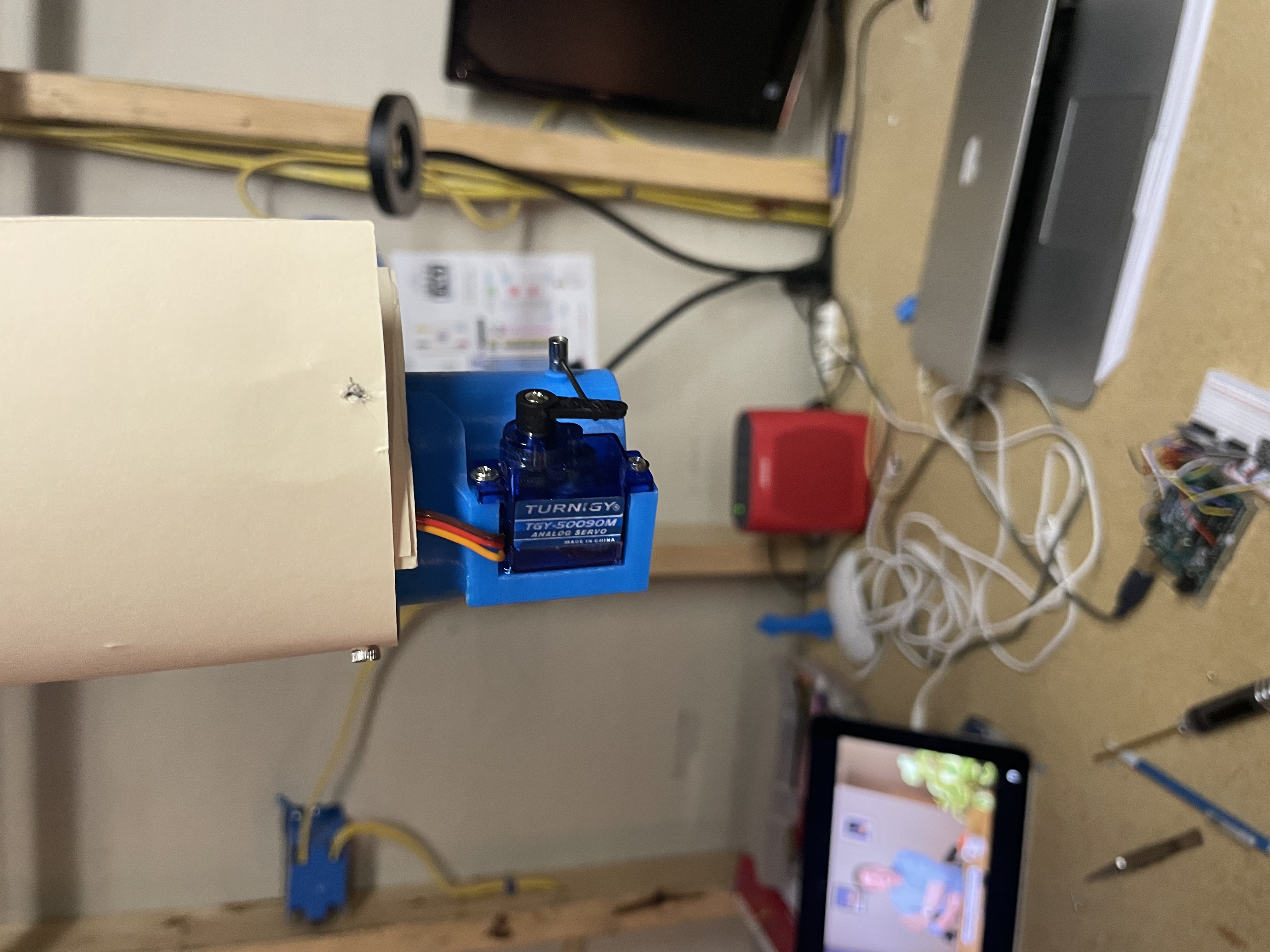
- Dynamic Control: The mount uses two small servo motors to tilt the engine based on data from onboard sensors.
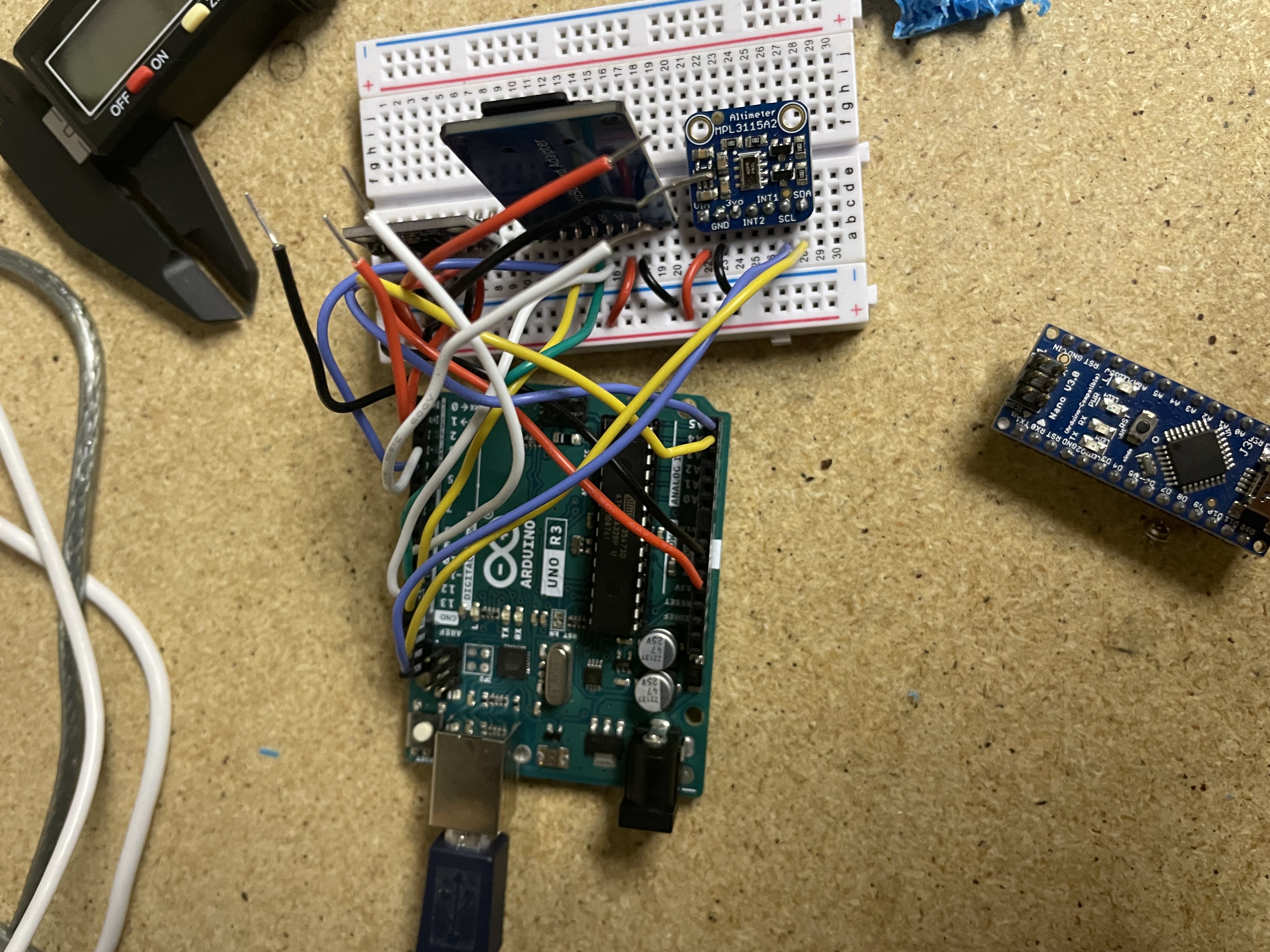
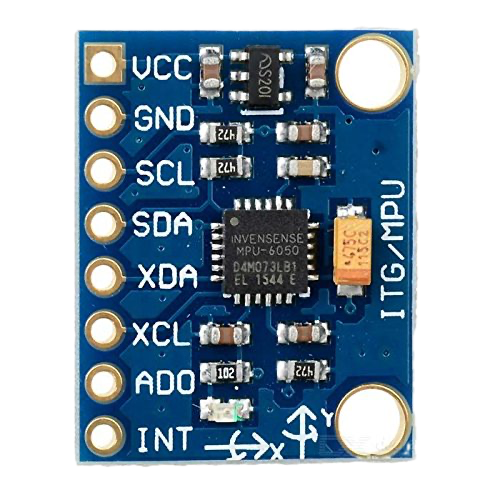
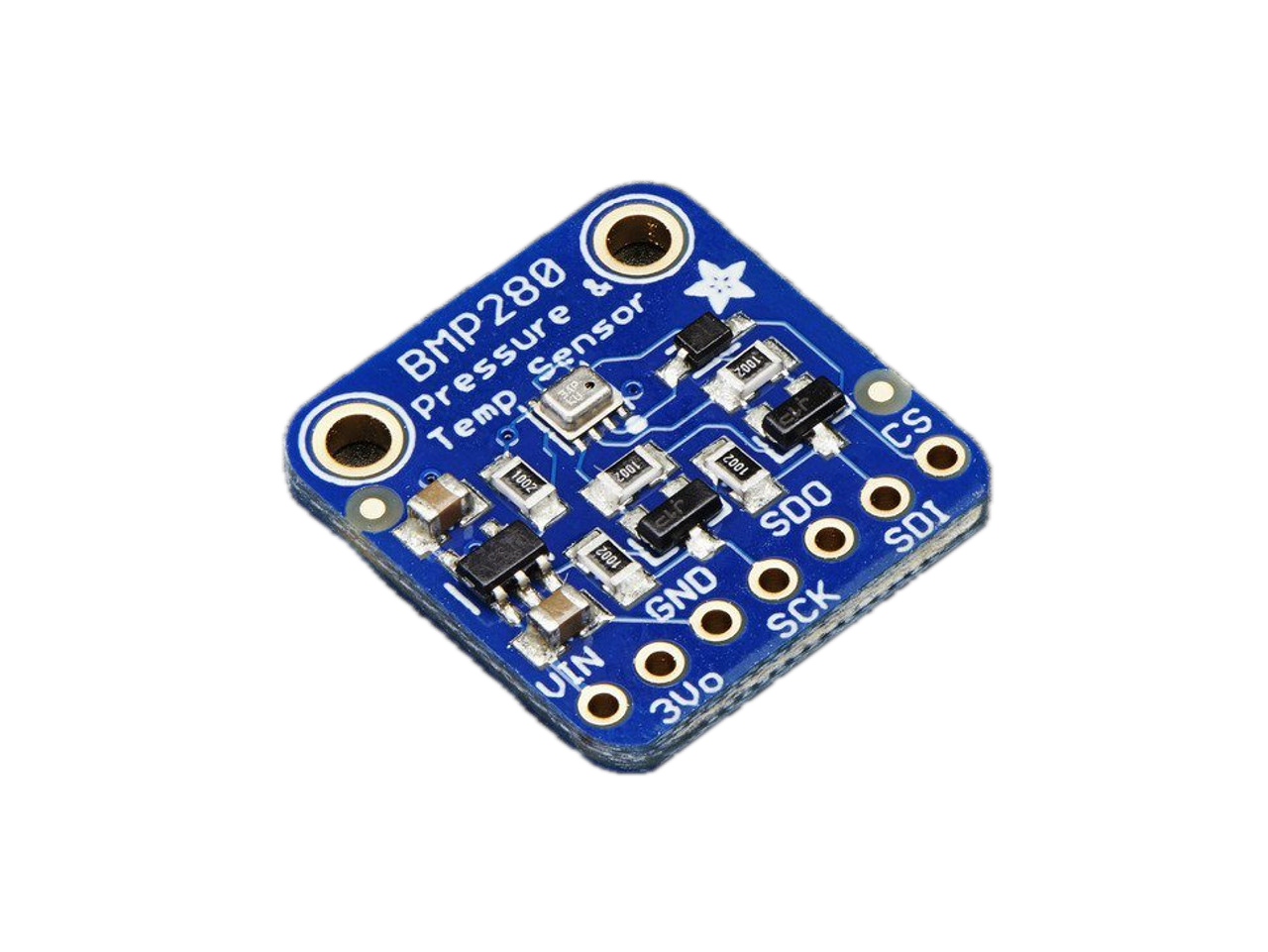
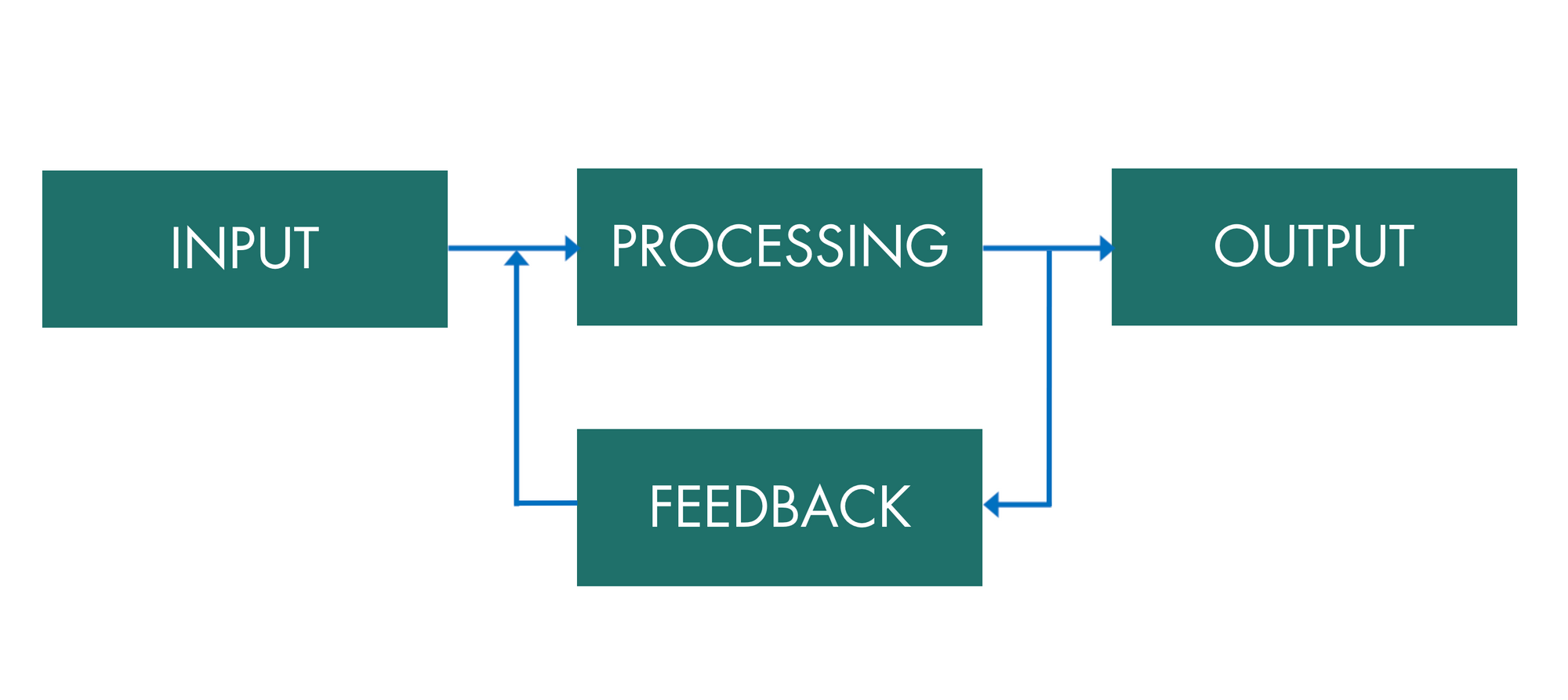
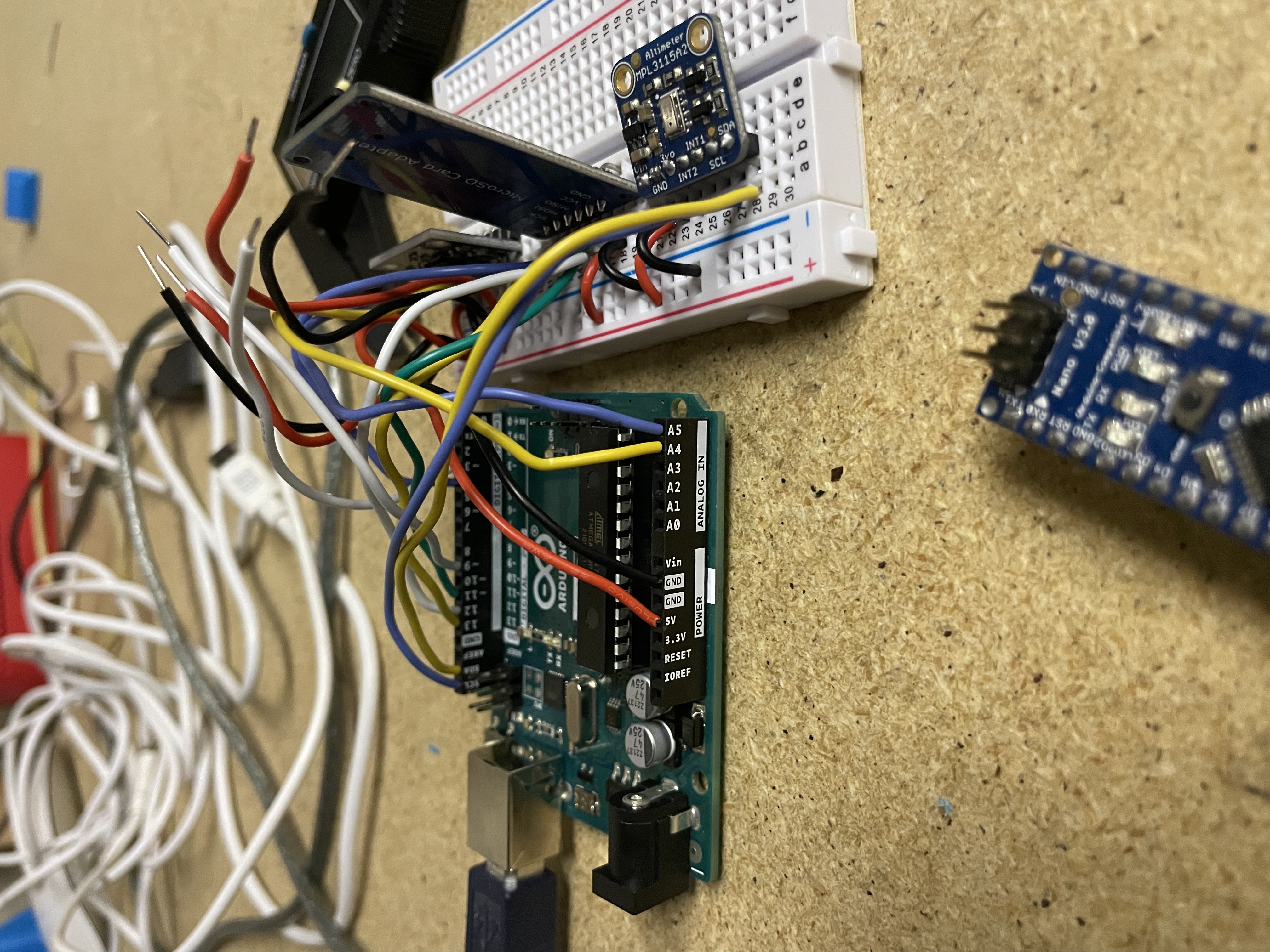
- Feedback Loop: A gyroscope and accelerometer provide real-time flight data, which is processed by a PID controller and Kalman filter. This ensures smooth and accurate corrections.
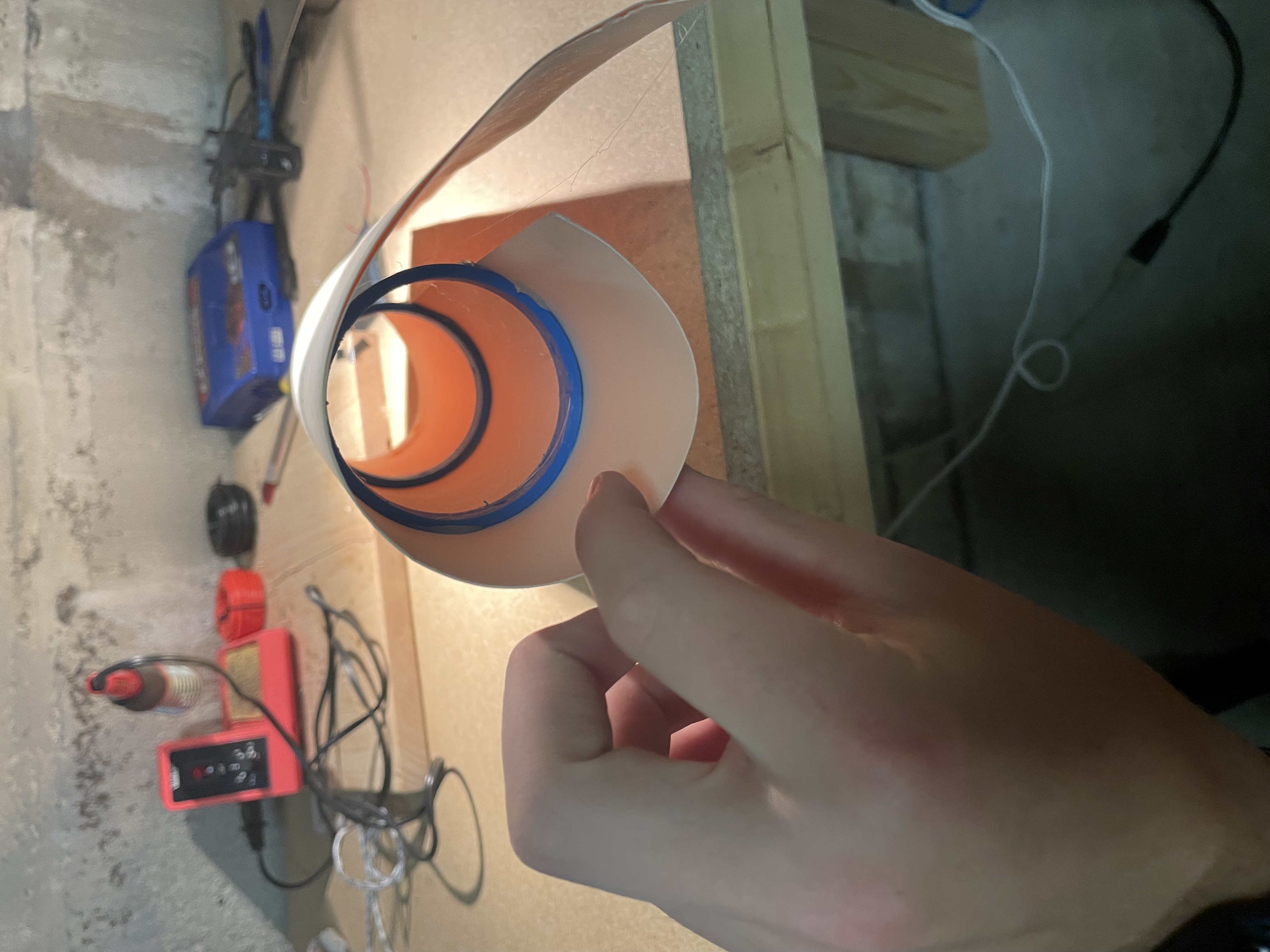
- Above-Center Pivot Point: The mount’s pivot design maximizes stability and efficiency by placing the control point above the engine’s thrust center.
Design and Build
- CAD-Designed: Fully modeled in Onshape, the mount was carefully engineered for precision.
- 3D-Printed: Fabricated with high-grade PLA for strength and lightweight performance.
- Integrated System: Works seamlessly with the rocket’s Arduino-based flight computer and sensors.
Why It Matters
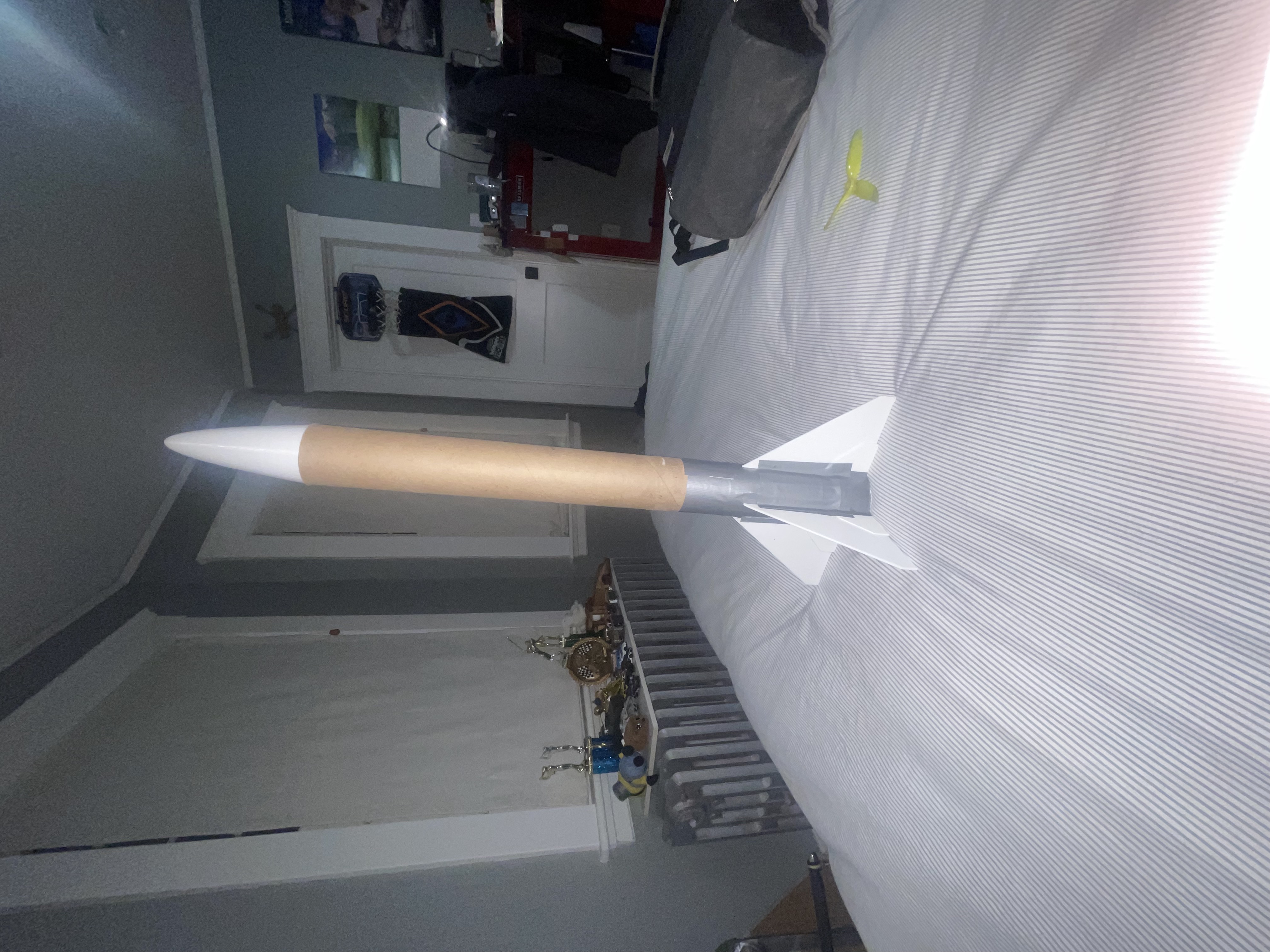
- No Fins Required: Traditional rockets rely on fins for stability, but the TVC mount eliminates this need, allowing for a sleeker design.
- Real-Time Adjustments: The mount can instantly respond to external forces, such as wind or imbalance, ensuring a steady and vertical flight.
- Advanced Control: This technology bridges the gap between professional aerospace systems and model rockets.
The VMAX Rocket’s TVC mount demonstrates how high-tech innovations can be applied on a smaller scale. It’s not just a model rocket feature—it’s a proof of concept for scalable, cutting-edge aerospace engineering.